Daniel.Ding
Daniel.Ding Ding
Ding












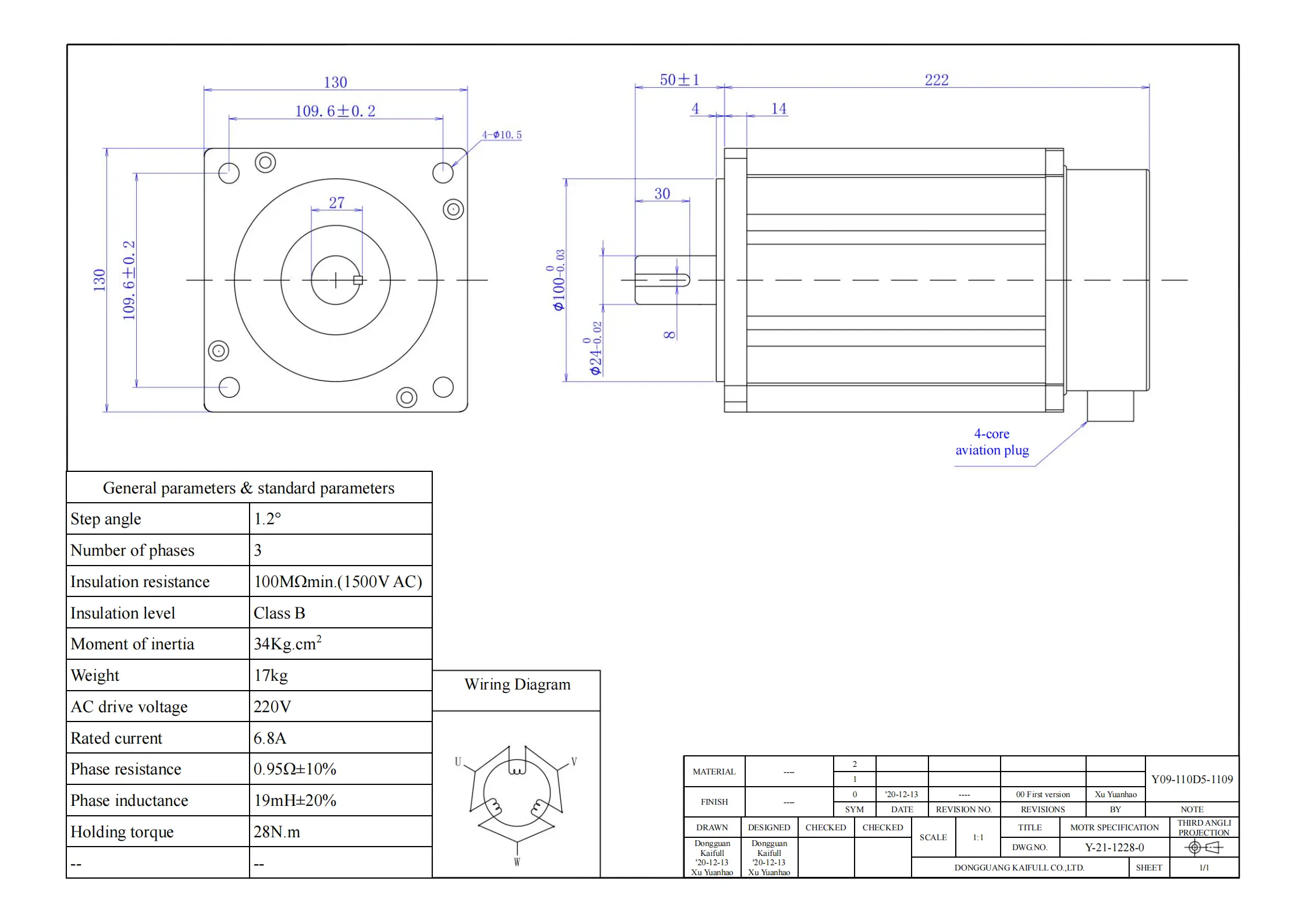
High-Torque Y09-130D5-1328 Three-Phase Stepper Motor
The Y09-130D5-1328 stepper motor is a robust and high-performance motor designed for applications that require precision and reliability. With a step angle of 1.2°, this motor offers exceptional control over motion, making it suitable for various automation and control tasks. The three-phase configuration ensures smooth operation and high torque output, which is crucial for demanding applications in robotics, CNC machines, and industrial automation.
One of the standout features of the Y09-130D5-1328 is its impressive holding torque of 28N·m. This high torque capacity allows the motor to maintain its position under significant load, providing stability and accuracy in applications that require precise positioning. The moment of inertia is rated at 34 Kg·cm², indicating the motor's ability to handle heavy loads with minimal overshoot and improved responsiveness.
This motor operates at a rated current of 6.8A and is designed to work with an AC drive voltage of 220V. With a phase resistance of 0.95Ω±10% and a phase inductance of 19mH±20%, it is engineered for efficiency and optimal performance. The insulation level is classified as Class B, ensuring reliable operation even in demanding environments. Furthermore, the insulation resistance is a minimum of 100MΩ when tested at 1500V AC, highlighting the motor's durability and resilience against electrical wear.
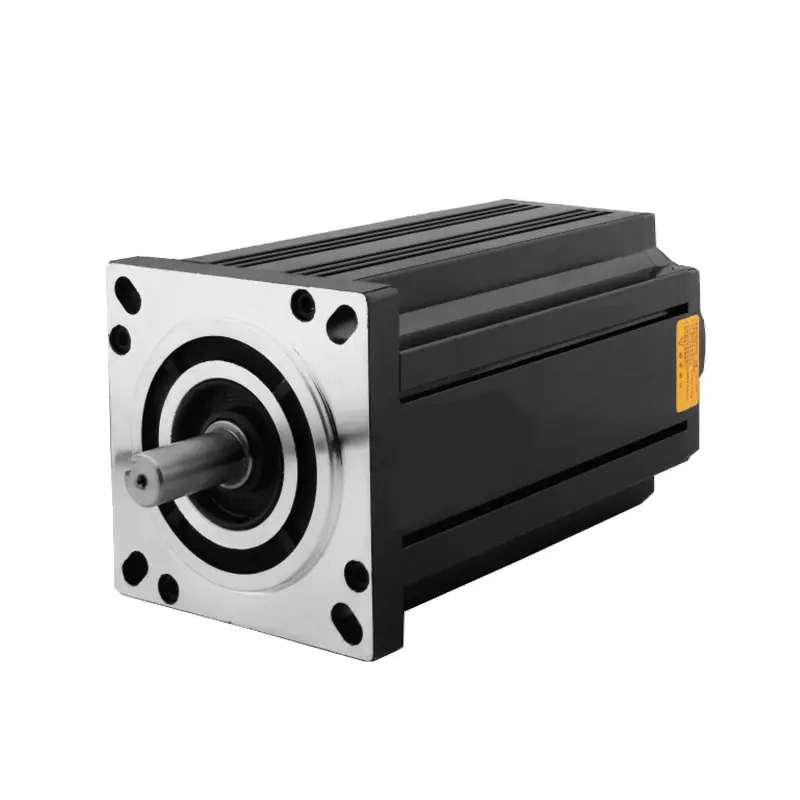
The Y09-130D5-1328 is designed for easy integration into existing systems. Its sturdy construction and substantial weight of 17kg reflect the motor's robust design, which can withstand harsh conditions and heavy use. Whether you are working on a new project or upgrading an existing system, this stepper motor offers the reliability and performance needed for today's advanced applications.
In summary, the Y09-130D5-1328 three-phase stepper motor stands out with its high holding torque, exceptional durability, and precision control. It is an ideal choice for industries that demand high performance and reliability in motion control systems.
| ●Motor configuration and performance parameters | |||||||||||||||||||||||||
|
|||||||||||||||||||||||||